Object pop-up: Can we infer 3D objects and their poses from human interactions alone?
We propose a novel characterization of the mold algorithm to work on arbitrary curved surfaces.
We propose a novel characterization of the mold algorithm to work on arbitrary curved surfaces.
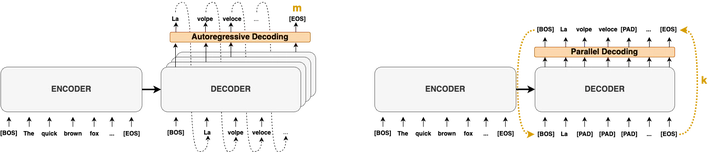
We propose a parallel decoding algorithm to speedup transformer inference for translation.
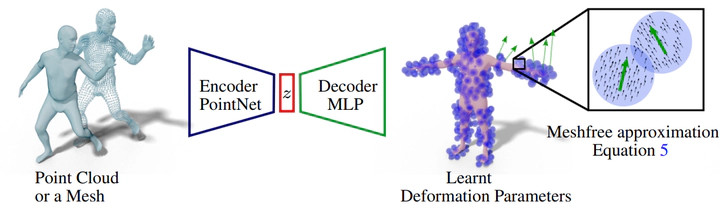
A novel approach for non-rigid correspondence based on mesh-free methods.
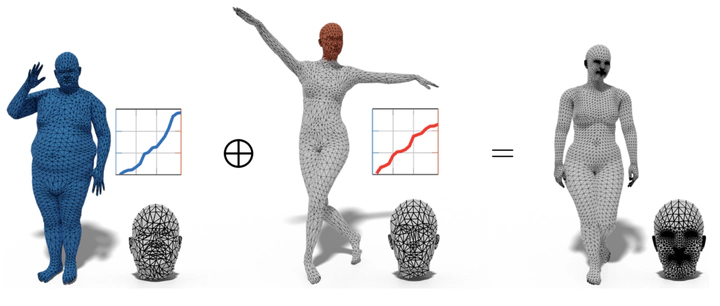
We combine the spectra of different linear operators to learn of to semantically modify shape geometries.

We propose a novel characterization of the mold algorithm to work on arbitrary curved surfaces.
A data-driven solution and analysis of the theoretical problem of recovering a shape from its spectrum

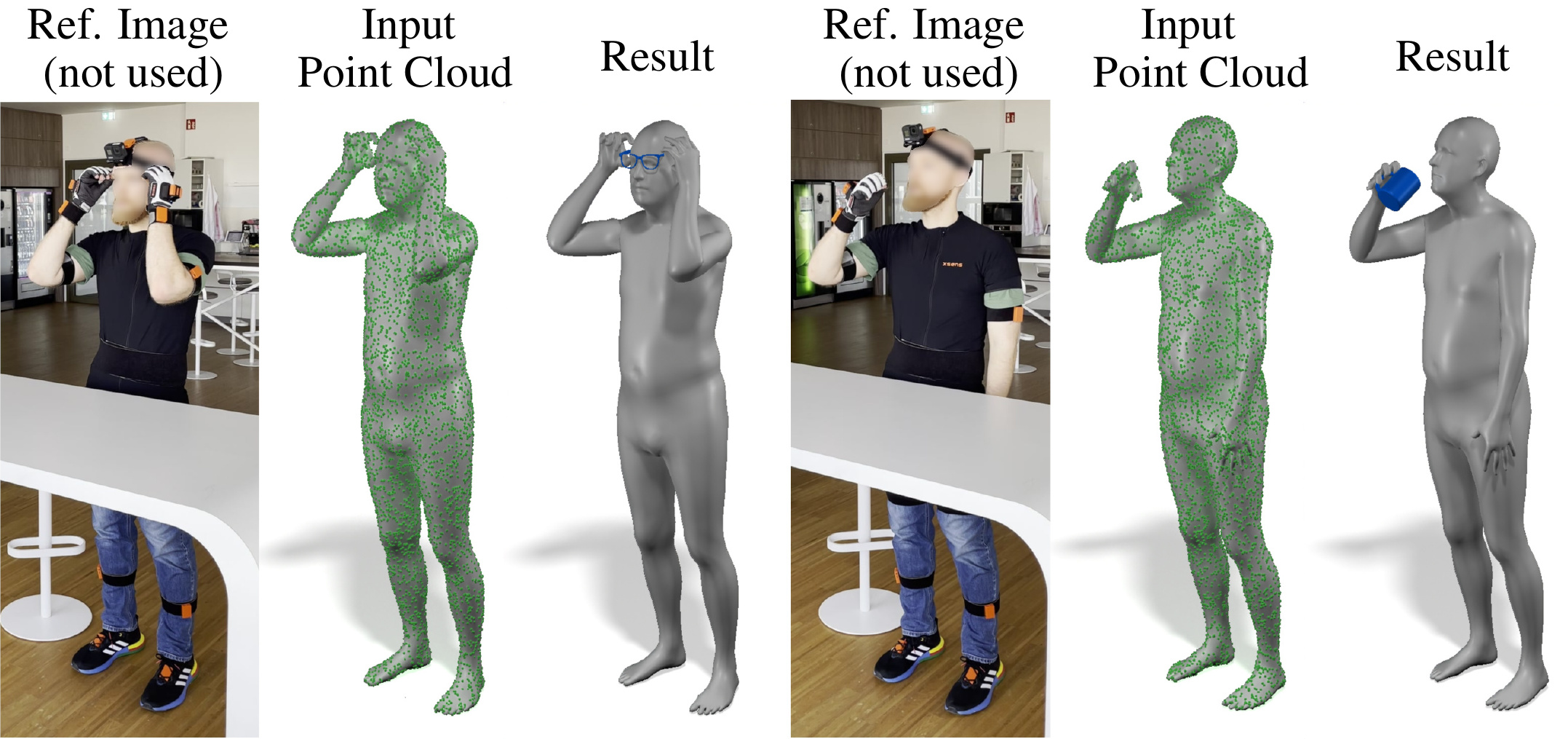
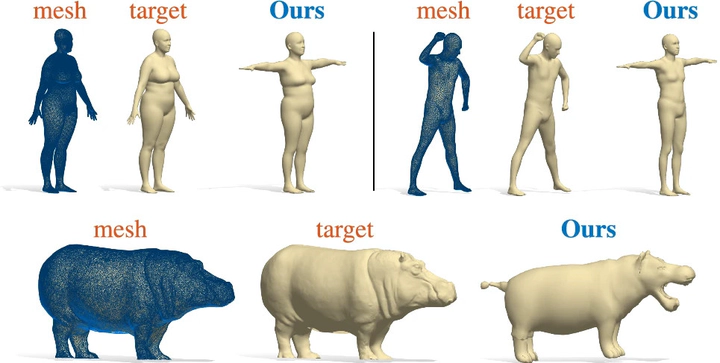
We propose a transformer-based procedure for the efficient registration of non-rigid 3D point clouds.

Inspired by the Functional Maps paradigma, we learn a linearly-invariant embedding for 3D Shape Matching
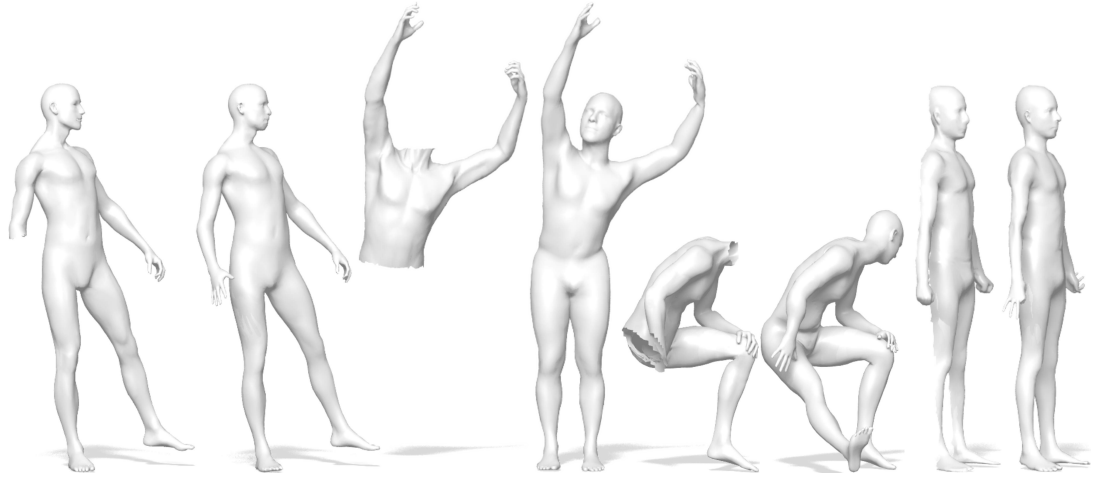
A full automatic pipeline for 3D human shapes that combine intrinsic shape matching and template registration